Publicaciones
En orden cronológico inverso.
Artículos académicos con revisión por pares
- Yuichi Kobayashi, Takeshi Sugimoto, Kazuhito Tanaka, Yuki Shimomura, Francisco J. Arjonilla Garcia , Chyon Hae Kim, Hidenori Yabushita y Takahiro Toda (2021) Robot navigation based on predicting of human interaction and its reproducible evaluation in a densely crowded environment. International Journal of Social Robotics, Vol. 14, pp. 373-387.
DOI
PDF
- Francisco Jesús Arjonilla García y Yuichi Kobayashi (2021) Supervised learning of mapping from sensor space to chained form for unknown non-holonomic driftless systems. Industrial Robot, Vol. 48, 5 pp. 710-719.
DOI
PDF
Otros artículos académicos
- Francisco J. Arjonilla y Tetsuya Ogata (2017) General problem solving with category theory.
DOI
PDF
Conferencias internacionales y domésticas
- 高見理瑛,笠原佑太,Francisco Jesus Arjonilla Garcia,早川智洋,小林祐一,竹下啓嗣,和田侑也,中村陽一郎 (2025) マニピュレータへの動作教示作業簡単化のための接触情報にもとづく経路生成. 第52回知能システムシンポジウム,A1-1,pp. 1-6.
PDF
- 笠原佑太,高見理瑛,小林祐一,Francisco Jesus Arjonilla Garcia,中村陽一郎,竹下啓嗣 (2024) 接触情報にもとづく 3 次元空間における手先姿勢を考慮したマニピュレータの経路生成. ロボティクス・メカトロニクス講演会2024,2A1-N05.
PDF
- Francisco Jesús Arjonilla García, Yuichi Kobayashi (2023) The POS library: a highly customisable coordinate system library for C++. En RSJ Conference of the Robotics Society of Japan, 1J4-05. Sendai.
PDF
DIAP
- Francisco Jesús Arjonilla García, Yuichi Kobayashi (2023) Generation of Door Opening Motionin a Simulated Mobile Manipulator by Bayesian Optimization. En The Robotics and Mechatronics Conference 2023 in Nagoya, 2A2-E12. Título original: ベイズ最適化を用いた移動マニピュレータによるドア開け動作の生成
PDF
DIAP
- Tenyu Sakakibara, Yuichi Kobayashi, Francisco Arjonilla (2022) Path generator of manipulator based on contact information and automatic tuning of meta-parameter of path generation. En SICE-IS The 49th SICE Intelligent Systems Symposium, C3-3. Título original: マニピュレータへの動作教示時間短縮のための経路最適化とメタパラメータ自動調整
ENLACE
PDF
- Anupam Choudhary, Yuichi Kobayashi, Francisco J. Arjonilla, Satoshi Nagasaka y Megumi Koike (2021) Evaluation of mapping and path planning for non-holonomic mobile robot navigation in narrow pathway for agricultural application. En IEEE/SICE International Symposium on System Integration (SII), TuC1.4. Iwaki, Fukushima, Japan, pp. 17-22.
DOI
PDF
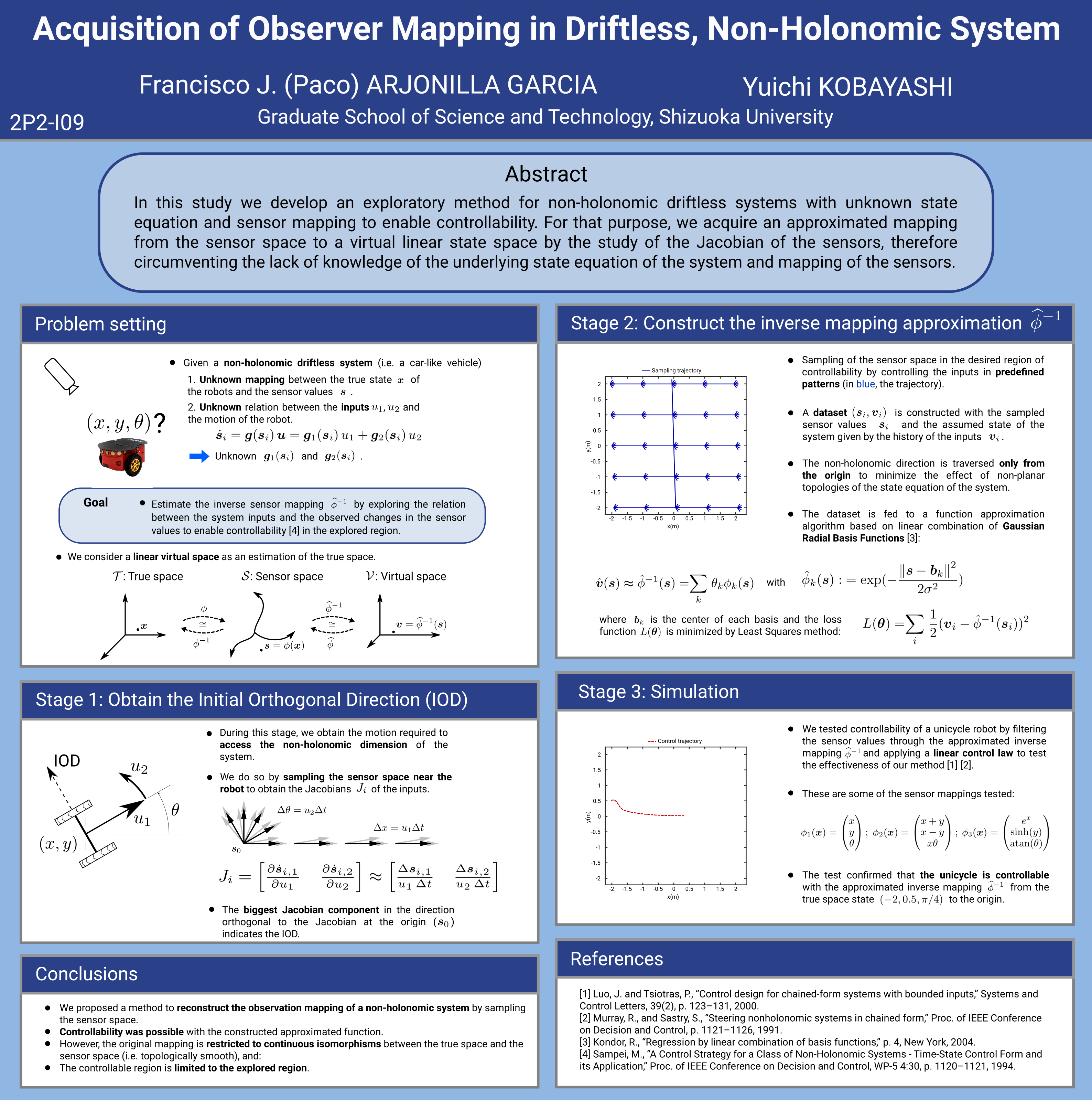
- Francisco J. Arjonilla Garcia y Yuichi Kobayashi (2020) Acquisition of observer mapping in driftless, non-holonomic system. En JSME annual Conference on Robotics and Mechatronics (Robomech), 2P2-I09, Kanazawa.
DOI
PDF
POSTER
- Francisco J. Arjonilla, Yuichi Kobayashi (2019) K-th order intelligences: learning to learn to do. En Annual Conference of the Japanese Society of Artificial Intelligence (JSAI), 2K3-E-1-04, Niigata.
DOI
PDF
DIAP
- Francisco Arjonilla, Yuichi Kobayashi (2019) The anthropocentrism of intelligence: Rooted assumptions that hinder the study of general intelligence. En JSAI Technical Report, SIG-AGI-011-07. Tokio.
DOI
PDF
DIAP
- Francisco J. Arjonilla y Yuichi Kobayashi (2019) The limits of meta-learning in artificial intelligence. En International Conference on Humans and Computers (HC 2018). Hamamatsu.
DIAP
Programa
- Francisco J. Arjonilla y Yuichi Kobayashi (2019) Classification of intelligence by meta-models. En Conference on Future of Advanced Researches. Shizuoka.
PDF
POSTER
- Francisco J. Arjonilla, Yuichi Kobayashi (2018) Definition of intelligence with linear orders for ontologies. En IROS – WOSRA. Madrid.
PDF
DIAP
- Francisco J. Arjonilla Garcia y Yuichi Kobayashi (2018) Trial and error-based necessary conditions for general intelligence. En Emergent Systems Symposium. Nagano.
PDF
POSTER
- Francisco J. Arjonilla (2015) A three-component cognitive theory: a theory about universal cognition. En Benelux Conference on Artificial Intelligence (BNAIC). Hasselt.
POSTER
Tesis
- Francisco Jesús Arjonilla García (2021) Control of non-holonomic driftless system with unknown sensorimotor model by Jacobian estimation. Tesis de doctorado. Universidad de Shizuoka. [Enlace]
PDF
DIAP
- Francisco J. Arjonilla (2015) A three-component cognitive theory. Tesis de máster en inteligencia artificial, rama cognitiva. Universidad de Utrecht.
ENLACE
PDF
DIAP
- Francisco J. Arjonilla García (2011) Desarrollo e implantación de plataforma robótica móvil en entorno distribuido. Tesis de Ingeniería Industrial. Universidad Politécnica de Madrid.
PDF
DIAP
{kind=link}