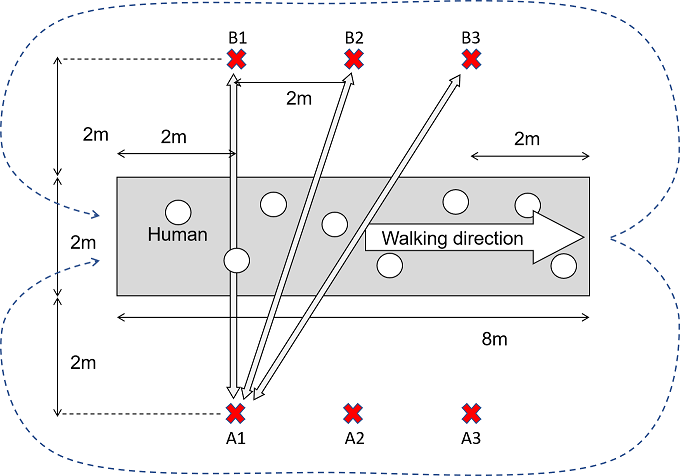
Fig. 1: Environmental setting for mobile robot navigation experiment in a crowded environment.
Updated: 19th May 2021
In most researches on mobile robot navigation in human-surrounded environment,
experimental evaluations have been conducted under varying crowd conditions.
Due to the fact that every proposed method is evaluated in its own environment
and condition, it difficult to objectively verify and compare their effectiveness
under a common condition. Therefore, we think that in the field of robotic
navigation in crowded environments, it is very important to have a common,
reproducible and controlled test. In this HP, we present a controlled experiment
with humans to evaluate performance of mobile robot in a densely-crowded
environment. Our proposed method and the detailed evaluation are presented
in the following paper:
Y. Kobayashi, T. Sugimoto, K. Tanaka, Y. Shimomura, F. G. Arjonilla, C.
H. Kim, H. Yabushita, T. Toda, Robot navigation based on predicting of
human interaction and its reproducible evaluation in a densely crowded
environment, International Journal of Social Robitcs, in press, 2021.
Fig. 1 shows the experimental environment. Humans move in the direction of the arrow, within the range indicated by the 2 m wide and 8 m long gray rectangle. There are eight humans inside this range, arranged so that their density is always 0.5 humans/m$^2$. Six points are defined on each side of the pedestrian flow, denoted A1-A3 and B1-B3, and the robot goes back and forth between each A point and the three B points. Crossing the flow once and arriving at the destination on the opposite side counts as one trial. In this way, each method is tested 18 times. We requested the following of the subjects while they were walking: to maintain the regulated density, enter the area as soon as another person leaves; when within the designated area, walk at a natural velocity; choose where to walk inside the area at random, preferably not along the middle line; do not alter behavior when approaching the robot and keep this response consistent; and do not learn or predict the robot behavior by its repetition.
Fig. 1: Environmental setting for mobile robot navigation experiment in
a crowded environment.
| A1 | A1-B1 B1-A1 | A1-B2 B2-A1 | A1-B3 B3-A1 |
| A2 | A2-B1 B1-A2 | A2-B2 B2-A2 | A2-B3 B3-A2 |
| A3 | A3-B1 B1-A3 | A3-B2 B2-A3 B2-A3(2nd) | A3-B3 B3-A3 |
| A1 | A1-B1 A1-B1(2nd) B1-A1 | A1-B2 A1-B2(2nd) B2-A1 | A1-B3 B3-A1 |
| A2 | A2-B1 B1-A2 | A2-B2 B2-A2 | A2-B3 B3-A2 |
| A3 | A3-B1 B1-A3 | A3-B2 B2-A3 | A3-B3 A3-B3(2nd) B3-A3 |
| A1 | A1-B1 B1-A1 B1-A1(2nd) | A1-B2 B2-A1 | A1-B3 A1-B3(2nd) B3-A1 |
| A2 | A2-B1 A2-B1(2nd) B1-A2 B1-A2(2nd) | A2-B2 B2-A2 | A2-B3 B3-A2 |
| A3 | A3-B1 A3-B1(2nd) B1-A3 | A3-B2 B2-A3 | A3-B3 B3-A3 |
| A1 | A1-B1 B1-A1 | A1-B2 B2-A1 | A1-B3 B3-A1 |
| A2 | A2-B1 B1-A2 | A2-B2 B2-A2 | A2-B3 B3-A2 |
| A3 | A3-B1 B1-A3 | A3-B2 B2-A3 | A3-B3 B3-A3 |