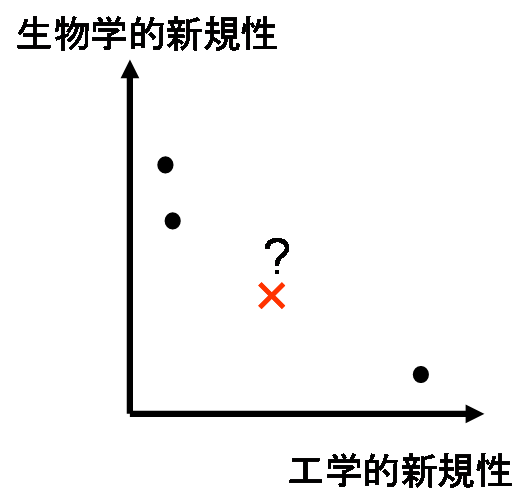
Fig.1 工学的新規性と生物学的新規性の観点からの評価
updated:2006/4/13
古くからロボットと人間を,より広くは工学と生物をつなごうとする研究はさまざまな形で行われてきた.この興味深いテーマを軸にどのように研究をすすめるべきか,本稿では,これまでの研究上の知見に基づく個人的見解を述べる.
ここで述べることをよりわかりやすく,説得力を持たせるためには,より多くの関連研究の参照と例示が本来必要であるが,生物と工学を関連付ける研究は過去数十年にわたる膨大な蓄積を有する.それらを網羅するために必要な労力を回避し,詳細さを犠牲にすることにする.
ロボットと人間はさまざまなレベルで異なる.工学と生物学を関係付ける研究には,一般に次のような期待が持たれている.
二つの期待に関するこれまでの成果には色々ある.最近では,構成論的ロボティクスと呼ばれる考え方なども後者に分類することができるだろう.これらの考え方がすでに多くの研究例において成功を収め,魅力あふれる結果を残していることに異論を挟む余地はないが,すべての研究例(特に過去の筆者の研究)が成功例といえるほど楽観視できるものでもない.
下図は工学と生物の両者に関わる研究の評価について示している.両者に関係する研究は,工学的な新しさ,生物への理解としての新しさ,という二つの切り口で一般に評価することができる.その一方で,その二つの切り口のどちらから見ても充分に新しいとは考えられない研究も存在する(図中×印).純粋に工学的なアプローチとして新しいわけでもなく,かといって本当に生物の原理を説明するところまで到ってもいない,という批判にさらされうる研究である.このような傾向が見られる研究の動機付けの例として,生物の原理を抽象的にとらえた上でロボット工学との接点を見出そうとする考え方をあげることができる(他にも種々あげることができるが,ここではそれぞれについて述べない).抽象化しているため,厳密に生物がやっていることを論じているわけではない.かつ,接点を見出そうとしているのであって純粋に工学的に新しいもの,より効率的なものを追求したわけでもないものである.
Fig.1 工学的新規性と生物学的新規性の観点からの評価
本稿の趣旨は,このような批判にさらされうる研究の意義を考え直すことでこれを擁護し,その価値を高めるために意識すべきことについて述べることである.次に,具体例として,筆者の過去の研究を違う角度から眺めることで,「生物でも工学でもない不十分さ」の問題に関する切り口を議論してみたい.
ここで一つの研究を例に挙げ,そこで得た教訓について述べる.
「視覚情報からの状態空間の自律的生成」
この研究の背景にあったのは,人間の知能(特に概念)が形成される過程として「分節」に注目したいという動機であった.分節とはもともと,Aであるものとそうでないものの境界を定めることである.知覚された情報に対してこのような境界の線引きを繰り返しながら,人間は概念を獲得していくと考えられる.ここで着目したかったのは,知覚情報や運動情報をただ単に分類するのではなく,「意味」を付与する過程として分節を考えることであった.「意味」とは本来生物においては生存本能に源を発する.ざっくりいうと,意味が生じるのは,本能,運動,知覚の三者の関係性からということである.これを工学の枠組みでとらえるため,本能にあたるものの代替として,「タスクへの評価」を用いた.これは,本能を「生存を目的とした(と解釈できる)内発的要因」ととらえ,これを「タスク達成を目的とした外部から与えられる要因」に置き換えたものである.
この研究では,上記のように運動,知覚,そして(本能の代替としての)評価という三者の関係性から表象を形成する過程として「視覚情報からの状態空間の自律的生成」をロボットの行動学習の枠組みで実現することを目的とした.具体的には,視覚情報をSOM(Self-organizing map;自己組織化マップ)に似た情報表現を用いてベクトル量子化する.この量子化はノードの生成に対応しており,行動しながら得られる評価をもとにノードを生成したり統合したりする.その結果として,タスクの成功・失敗に関係した2値評価に基づいたノードの動的生成・統合が行われ,タスク達成のために適切な視覚情報および行動情報の量子化が得られた.
さて,この研究を,工学でより広く受け入れられている道具で表現しなおすとどうなるのか.まず,知覚を状態変数(観測信号から状態変数への変換についてはここでは割愛する),運動を身体への制御入力と考えると,対象物操作問題を制御問題として理解できる.「タスクの評価」は,状態変数・制御入力の関数として(評価関数の形で)定義できる.この評価の時間積分を最大にする制御則を求める問題として,最適制御が知られている.さらに,この最適制御問題に対し,試行錯誤によって状態遷移モデルなどが未知の状態から最適な制御則を得る方法として強化学習を位置づけることができる.上記のノードの動的生成・統合の過程は,行動学習のための情報表現を逐次的に生成するものであり,機能的には強化学習のための関数近似器を逐次的に生成するものに対応している.
つまるところ,この研究で考えてきた「分節のモデル化」は,強化学習における関数近似方法の一つと位置づけることができることがわかる.このような見地ともともとの背景を考慮する見地から,この研究に対して次のような問いを立てることができる.
前者は工学的な枠組みの中で学習の道具をよりリッチにするにはどうするか,という立場から出る問いであり,後者は人間の知能とロボットの学習モデルの間のつなぎ方にこだわる立場からの問いである.さらに違う言い方をすれば,二つの立場それぞれから,この研究を批判することも可能である.
理想的には,この二つの批判のどちらも受け止め,こたえていくべきであろうと考える.次節ではそのための方策として,生物と工学の接点を狙った研究について3つのアプローチという分類を試み,提案に導く.
前節までの議論を踏まえ,生物と工学の接点を狙った研究を3つのアプローチに分類することができる.
下図は3つ目のアプローチの評価を概念的に示したものである.1,2のアプローチの意義はもちろん,生物学・工学的な新規性として理解できる.3のアプローチについては,両者の関係付けを目的とした研究と位置づける.図中の灰色の曲線は,何らかの抽象化を行ったことにより工学と生物の関係を論じることができるようになった,ということを表している.1,2の立場からは3の意義を直接に評価することはできないが,3の立場には独自の意義があるはずである.なぜなら,「明らかにする」ことも間違いなく新しい知見であり,長期的には1,2の研究に貢献できるはずだ(と期待される)からである.
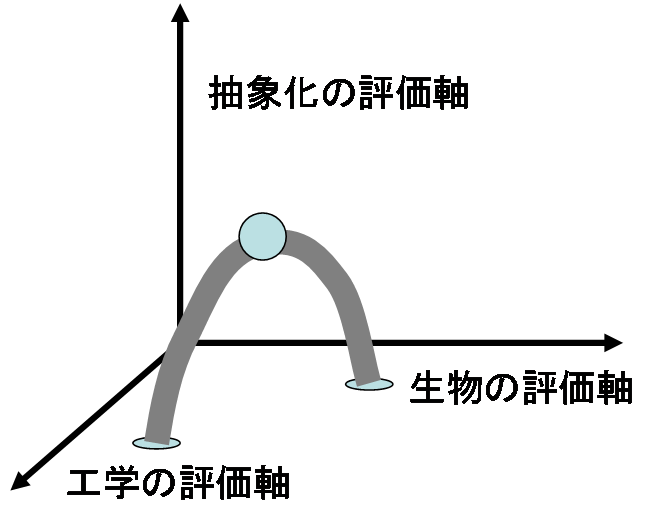
Fig.2 抽象化の評価軸を導入した研究の評価
逆に,3の立場に独自の意義を認めないとすると,研究を進める上での弊害が生じるのではないだろうか.すなわち,1,2の立場ですくいとれないような研究も,意義を認められるために1,2のいずれかの意義があるかのように脚色せざるをえなくなる.するとそのような研究は生物と工学の関係をむしろあいまいにし,結果として,3のアプローチでは積極的に評価されるべき「相似・相違を明らかにする」こととは逆行することになってしまう.
もし3の立場に意義を認めることができるならば,そこで重視すべきなのは,1,2いずれかでの意義よりもむしろ「明らかにする」という側面であろう.図中の○同士をつなぐ灰色の曲線部分である.曲線部分をわかりやすくするためにまず必要なのは,提案するモデル(図中情報の○印)と,工学に接地する過程,生物に接地する過程を分けて考えることである.工学に接地するとは,提案するモデルを純粋に機能的に説明する(前述の例ならば,「これは関数近似です」という)ことである.生物に接地するとは,「生物の振る舞いのこのレベル・側面を切り取ったものだ」と説明することである.
一見すると,提案するモデルを普通の工学の土俵に乗せて単純に機能的に説明することは,本来の主張や背景を圧殺しているため自己否定のような印象を与える.説明しないほうがよい印象を与える可能性もある.しかし,生物と工学の接点を狙うというモチベーションはすでに様々な分野で広く共有されていることから「理解されるために背伸びをする」という必要はないし,長い目で見れば,あいまいさを排除したほうが研究全体の貢献につながることは間違いない.
本稿では,生物と工学の接点を狙った研究に関連して,第三のアプローチ(関係を明らかにすることに重点を置く立場)を積極的に評価してはどうか,という提案を行った.
主に自戒のための主張と理解していただければ幸いである.筆者自身は現在,工学的な評価に軸足をおきながら研究を行っている.これは,生物と工学を関係付ける議論がリッチになるためには,まず道具自身をリッチにしなくてはならない(そうでないと議論できることに広がりが出ない)と考えるためである.ただ,道具をどの方向にリッチに発達させるべきかに関しては,生物に関する理解がやはり重要な役割を果たしているように思う.